aMAZE-O is an autonomous robot designed to explore and solve a maze efficiently. Competing in the Polymaze robotics competition, the robot completed a full maze exploration run to gather path data, followed by an optimized second run to reach the exit via the fastest route. Eventually , i secured a second-place win in the competition
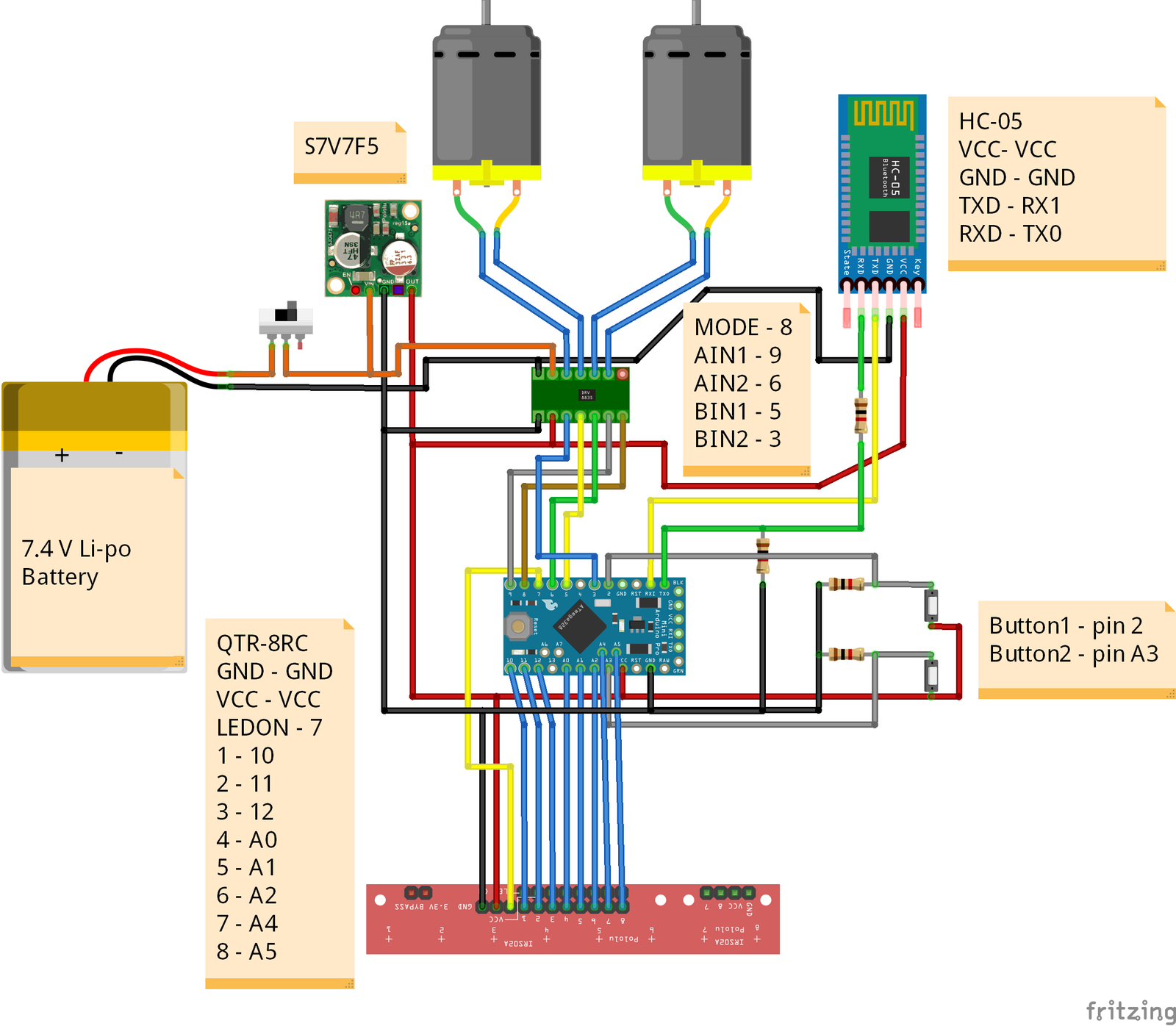
Schematics
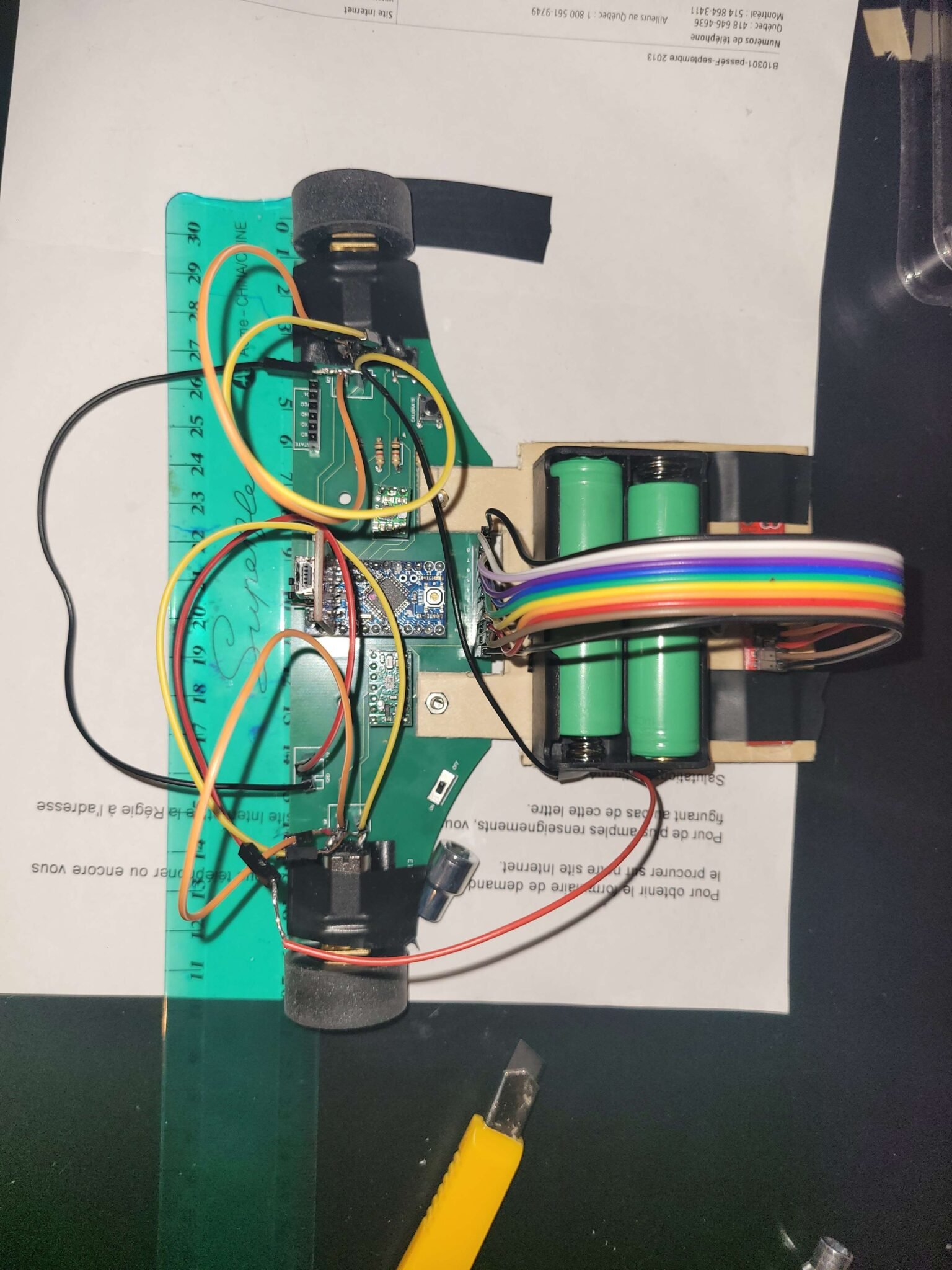
Initial design
Performance and tuning
Maze solving
Environmental and sensor limitations presented challenges for path tracking accuracy, so I created an Android application to visualize and validate the paths in real time. The app allowed debugging of the robot’s navigation and optimizing performance to